As a result the inverter shuts off and cannot be restarted while still moving, because the FOC implementation cannot start into a running motor. Consequently you have to stop and restart the car.
Reason:
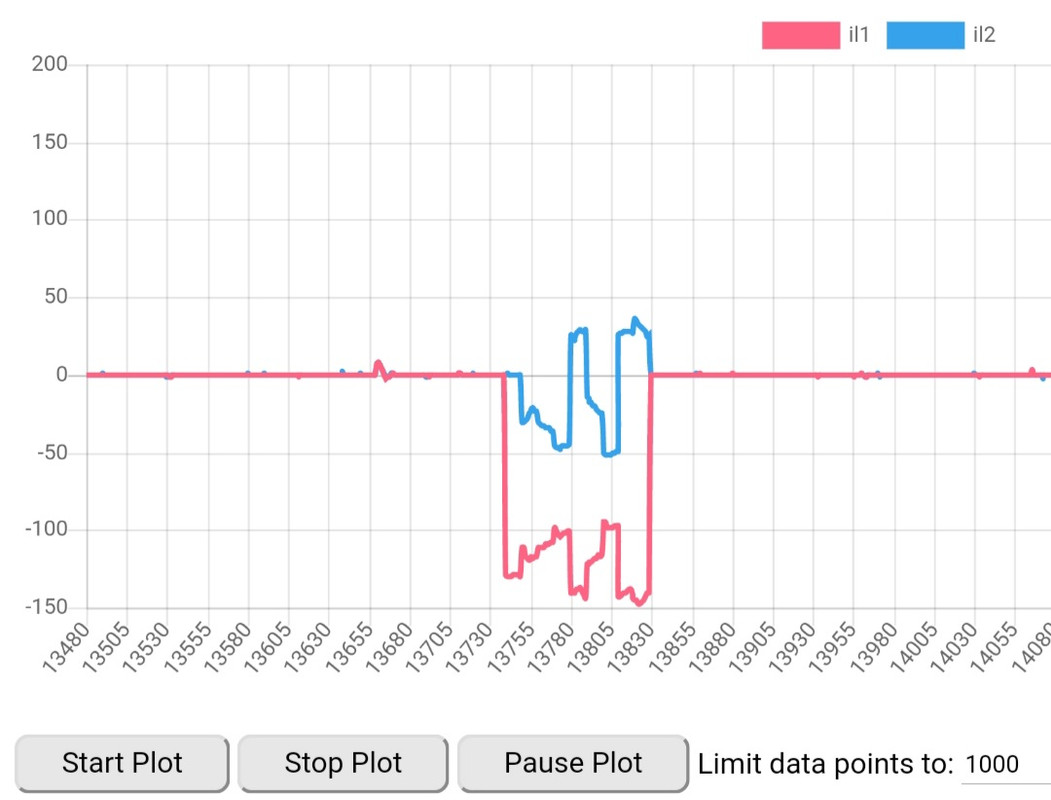
The PI regulator for d current has to transition very fast from negative to positive output when going into regen. Any lag in that will interrupt the field weakening process and allow excessive regen currents which then trip out the inverter.
Current fix:
When driving at high rpm come off the throttle slowly. If traffic doesn't allow for that, you're screwed
Planned fix:
I will introduce another ramp that comes in effect at high rpm that slowly brings on regen.
EDIT:
Actual fix: lower regenramp to 0.3
Just did a test drive and it is super smooth and has no problem transitioning between accleration and regen even at 7500 rpm