Ev8 wrote: ↑Sun Oct 29, 2023 8:12 amCool, it’s been a long time since an update , id almost assumed yours was one of many abandoned projects
*glares* ... Like your DC version of the Prius Gen 2 board everyone's waiting on? I kid, I kid, I'm rounding 5 years on my "summer project, just need a few weekends."
...
Actually I post regularly about it, I just try to tailor the conversation to the community I'm posting in. I view participation in a community as the payment I make for the help they give. The lifeblood of a forum is seeing that your advice made a difference to someone, and seeing how their project turned out.
Over on the OpelGT forums, it's mostly about classic car revival and a moderate amount of how I'm converting it. That's where I ask for car-specific advice. Measurements, how the vehicle is supposed to be assembled (I've never driven or seen my car in original state), etc. https://www.opelgt.com/threads/matts-el ... st-1400633
Over on the DIY Electric Car forums, it's pretty similar to the OpelGT forums with a bit heavier focus on the conversion aspect and the caveman machining. I'm the main/only admin there now, so I'm checking in and sweeping the spam out daily. Since most of the more knowledgeable crowd packed up and moved over to OI, it's more entertainment there. https://www.diyelectriccar.com/threads/ ... st-1039477
Here, I haven't posted as much in my own build thread as I have in Prius Gen 2 through-hole board thread. And, since I'm pretty useless for advice, I don't participate much on the forums but try to thoroughly detail every bit I can into the various wikis, so no one ever has to ask the same questions I did. My time kinda gets swallowed spam cleaning and squabble-suppressing on the DIYEC forums so I don't get a lot of time here. When I have inverter-specific and deeper electronic concerns, I ask those questions here.
Next up is mostly mechanically mounting the motor, and then I'll have to start using current sensors, integrating throttle, an HV battery, a contactor box, etc so there's lots of inverter-related content in the medium future for me here.
Ah 150Hz on 6pole motor. That should be 300Nm torque and 3000RPM. Would that be good for the highway? Probably... but would the acceleration be good as well? What kind of transmission do you use? Couldnt you get 200Hz out of the motor by field weakening the OI and use 3rd gear equivalent?
Edit: I am sorry if i dont know what gearing is in the tailshaft, transmissions are really the thing i want to avoid .
arber333 wrote: ↑Sun Oct 29, 2023 9:16 amAh 150Hz on 6pole motor. That should be 300Nm torque and 3000RPM.
Mmm, yes, that's what you guys figured. 3 pole pairs, so, should be around 150hz @ 3000RPM.
Tire circumference is roughly 2m.
That's 500 revolutions to a km.
100km/hour is 50,000 revolutions per hour.
3600 seconds in an hour = 13.9 tire Hz.
Final drive is 3.44, and stock 4th gear was 1:1
Would that be good for the highway? Probably... but would the acceleration be good as well?
I don't know. In goes battery, out goes AC, in between is black magic.
In my head, if I'm not accelerating fast enough, I just push the pedal down more and the OI software does... more. Right now it's just run in manual mode with no current sensors or resolver, just blindly punching in numbers for fslpspnt.
What kind of transmission do you use? Couldnt you get 200Hz out of the motor by field weakening the OI and use 3rd gear equivalent?
Edit: I am sorry if i dont know what gearing is in the tailshaft, transmissions are really the thing i want to avoid .
There is no transmission. I only retained the tailshaft to mesh with the propellor shaft, and the tailshaft housing because the prop shaft is what actually rests on the bushing (it's female, the tailshaft end is male and goes inside).
The only thing inside the tailshaft housing is a speedometer gear. 4th gear was 1:1.
I was only using two car batteries @ 24v for the test. I don't have a grasp for what happens when I put a car behind all of this, and exactly what the inverter does or needs or will do when I feed it 200-400v of battery pack.
Why would it suffer from insufficient acceleration? What about the motor or inverter or my setup tells you that?
MattsAwesomeStuff wrote: ↑Sun Oct 29, 2023 10:53 am
Mmm, yes, that's what you guys figured. 3 pole pairs, so, should be around 150hz @ 3000RPM.
Tire circumference is roughly 2m.
That's 500 revolutions to a km.
100km/hour is 50,000 revolutions per hour.
3600 seconds in an hour = 13.9 tire Hz.
Final drive is 3.44, and stock 4th gear was 1:1
...
So 300Nm (persumably) x 3.44 = 1033Nm... not much but not too bad either. What is to be the empty weight of the car?
Usually for 1t cars you need 1200Nm at the wheels for good acceleration. Then for 1.3T you need 1500Nm. Transmission is usefull just for that, downshift for starting. Later on its just useless with EVs. Most modern EVs now run as they would be in 2nd gear permanently .
Maybe you can replace the rear diff with some higher one later on? Maybe 4.2 x 300Nm = 1200Nm...
Or you can get motor rewound for lower voltage = more torque at lower RPM.
EDIT: I remembered one guy who installed a direct drive motor into a Porsche Roadster. 260Nm and 44kW low voltage 4pole motor. Motor was short but it had huge crossection so good starting torque. Maybe it will be enough.
arber333 wrote: ↑Sun Oct 29, 2023 11:09 amSo 300Nm (persumably) x 3.44 = 1033Nm... not much but not too bad either. What is to be the empty weight of the car?
845-950 kg curb weight stock. I'll be fatter because of my abusively large motor and batteries.
Where are you getting a 300Nm ceiling from?
Maybe you can replace the rear diff with some higher one later on? Maybe 4.2 x 300Nm = 1200Nm...
If I replace the diff with anything, it's going to be to replace all of this with an Outlander rear.
Or you can get motor rewound for lower voltage = more torque at lower RPM.
MattsAwesomeStuff wrote: ↑Sun Oct 29, 2023 11:54 am
845-950 kg curb weight stock. I'll be fatter because of my abusively large motor and batteries.
Where are you getting a 300Nm ceiling from?
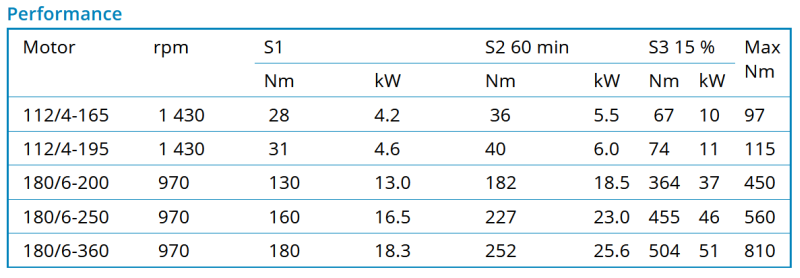
Its my simplification. Industrial motors worth being put in any car would have approx 200Nm being 4pole. Do you have a nameplate with motor data by chance? If you take the same frame and wire it for 6poles you will get about 1.5x torque but at lower base speed. This means less torque available at higher speeds.
If I replace the diff with anything, it's going to be to replace all of this with an Outlander rear.
arber333 wrote: ↑Sun Oct 29, 2023 1:43 pmIts my simplification. Industrial motors worth being put in any car would have approx 200Nm being 4pole. Do you have a nameplate with motor data by chance?
Maybe GT would fare better with Lexus IS300 transmission?
I've looked, and it's hard to find out exactly, but I don't think any 300H's were ever sold in North America. 450H's yes, but, I don't want anything that size.
The reason I'd learn towards Outlander is weight savings and suspension improvements. The limiting factor on my car's speed is the original diff, it'll shatter above about 100hp being put through it.
WoW! This would really have a punch on start. But later on you would have to go deep into field weakening and torque will suffer there.
Yes, I think that's what you've said in the past. I'm going to have trouble getting it up to speed.
At least I know it can reach those speeds now, albeit entirely unloaded.
Well if you calculate then nominal power at 50Hz nominal speed 1000rpm.
Torque (N.m) = 9.5488 x Power (kW) / Speed (RPM)
You get 175.70Nm at base speed.
If you go for max power at 37kW and 450Nm you must consider that those values happen at 1000rpm. With high frequency operation you would get higher values for short time but with saturation the only way to get more speed is to weaken the field. Power will stay the same and torque will diminish, but it wont matter because you will drive at higher rpm.
I would suggest you can get like 65kW from your motor unless your inverter throws overcurrent because of small core resistance (low voltage).
When i used my 72Vrms motor with 300Vdc OI back in 2015 i had to increase motor base speed to over 200Hz to get smooth takeoff. But it also took forever... You should test this .
arber333 wrote: ↑Sun Oct 29, 2023 11:19 pm
Well if you calculate then nominal power at 50Hz nominal speed 1000rpm.
Torque (N.m) = 9.5488 x Power (kW) / Speed (RPM)
You get 175.70Nm at base speed.
I'm with you so far. But I suspect a lot of what I'm asking is going to seem like me asking the same question different ways, because I can't put the pieces together in my head right.
If you go for max power at 37kW and 450Nm you must consider that those values happen at 1000rpm. With high frequency operation you would get higher values for short time but with saturation the only way to get more speed is to weaken the field. Power will stay the same and torque will diminish, but it wont matter because you will drive at higher rpm.
I'm honestly not even sure how to get 37kw from that nameplate. Nor, how you go from 364Nm at S3 up to 450Nm "max".
At 48v, (call it 51v) and 446 amps max, that's only 23kW. To get to 37kw, you'd have to be pulling 725 amps.
Your formula says that torque decreases proportionally with RPM, so, my torque at standstill is going to be enormous, even higher than 450Nm. Factory, they had 150Nm @2500 (and 90hp).
I would suggest you can get like 65kW from your motor unless your inverter throws overcurrent because of small core resistance (low voltage).
I haven't decided if I'm going to target ~220v like the Prius was designed for, so that all that stuff works correctly, or whether I'll design it for 400v like a normal EV.
Inverter-wise I believe Damien tested and found the Gen2 MG2 overcurrents at 350A. So, 220v*350a = 77kW. I'm not sure if that was one phase, or, how to apply that context to what I'll be doing.
With 400v that'll be 140kW. I feel like that's more than I'll ever use, (would destroy the car), but who knows how I'll feel when driving.
When i used my 72Vrms motor with 300Vdc OI back in 2015 i had to increase motor base speed to over 200Hz to get smooth takeoff. But it also took forever... You should test this .
Yeah, I don't have a head for how frequency and saturation affects this.
MattsAwesomeStuff wrote: ↑Tue Oct 31, 2023 4:58 pm
---------
I'm honestly not even sure how to get 37kw from that nameplate. Nor, how you go from 364Nm at S3 up to 450Nm "max".
At 48v, (call it 51v) and 446 amps max, that's only 23kW. To get to 37kw, you'd have to be pulling 725 amps.
You will use 220Vdc wont you? Then 37kW should be at 170Adc!
Your formula says that torque decreases proportionally with RPM, so, my torque at standstill is going to be enormous, even higher than 450Nm. Factory, they had 150Nm @2500 (and 90hp).
Hm... that means 67kW at 2500RPM? Was close...
If you can get a dyno for that motor or some valid power points you can estimate your output.
Ok, so we agree energy cant be created from 0 and cant be put to 0 = energy conversion assumption?
We go and mix power equasion from mechanical relation;
Power (kW) = Torque (N.m) x Speed (RPM) / 9.5488
With electrical power equasion;
P = Voltage * Current
This assumes no friction or ohm losses or voltage drops of course
Now there is a reasonable limit to power since winding steel has only so much capacity for magnetic charge before it becomes saturated. This happens at max power limit. When there we desire constant power up to the max RPM. But saturation will limit us with electrical power. Now to increase RPM we need to keep power constant. So torque will have to decrease as we increase RPM according to mechanical equasion.
We call this field weakening because current is pumped into the motor at not-optimal angles and some of it goes wasted across the windings. Hence magnetic field gets weakened and there is residual voltage component which allows motor to rotate past its backEMF limit... all very differential math...
If the car is light enough you wont notice this very much as power should remain the same. But you need to have good motor and inverter cooling.
I haven't decided if I'm going to target ~220v like the Prius was designed for, so that all that stuff works correctly, or whether I'll design it for 400v like a normal EV.
------
I like higher voltage more because there are more possible OEM components i can appropriate there...
But you certainly can use Prius DCDC as intended .
At 200hz I'd be going 133km/h (minus slip).
Ah ok; so that one is not active frequency but rather a setting of inverter ramp on how a motor should behave. Its a base frequency limit. Your motor has it at 50Hz for 35Vac, so when using it at higher voltage you need to stretch it out towards 200hz so motor response should be more like a rubber than a spring. You get OC thrown because of too much current going into low resistance coil without doing any work.
Starting torque from ACIM is not like DC motors.
Inverter needs to increase starting voltage, cca 30% of nominal voltage which we call boost parameter. That is the sound you hear at start- as you would pull on the cats tail .
As soon as the motor is rotating this voltage subsides and now OI follows normal V/Hz loop.
I would say ACIM starting torque is more like pulling a rubber instead of tugging on a rope for DC motor.
Figured I'd give you guys a little update, even though it's not Inverter-related content.
I finished my motor mount, or, finished it enough to hold the motor in the car via gravity.
Then, despite it being 100% waste of time only to satisfy my ego because the next thing I have to do is take it all right back out again, I threw some 2x4s across the engine bay, set my inverter on them, threw a car battery as my "HV" pack in the passenger "seat", bolted up the driveline, jacked up the diff so the tires were off the ground, and gave it its first spin.
Gregski wrote: ↑Sat Apr 06, 2024 5:56 am
there is a lot of cool sh!et in this thread and the humor is on point !
Thanks.
The thread on the DIY EC forums and OpelGT forums have at least 10x as much content and pics. I try to keep this one about electronics, and I just don't make that much progress. I've got probably 20x as many posts on the thread for the control board here.
I don't post a lot of updates here ever, but, rebuilt the rear suspension and have just started rebuilding the front suspension, including paying more for all the boots, bushings, brakelines and thingamabobs than I did for both entire cars.
So, that's at the most dangerous part of half-done, where the car can't move until it's done, the pieces fill a whole room, some of parts being replaced were damaged in removal, but it's not back together yet...
At least everything so far went perfectly because I had all the correct tools.
I also finally bit the bullet and bought a spot welder and a fancy pen with independently spring-mounted electrodes if I want to mount them on a swing-arm later:
Could you post what components you ordered from Digikey if you still have that info?
I'm in the same boat you were, I'm staring at a list of 1uf capacitors and I don't know which ones will work.
I'd also love to know the part numbers for the 6 and 10 pin wire connectors and the 10 pin 90 degree connector for the ESP8266.
tonycoke wrote: ↑Sat May 25, 2024 11:11 pmHey Matt, have you gotten the Opel rolling yet?
Finished the rebuild of the front suspension last week.
Finishing up the rear suspension tonight if I'm lucky. Needs paint and to press in the new bushings.
Finishing the driveline assembly tomorrow if everything goes perfect.
Then it could be tested up on jackstands via programming.
Brakes, I don't trust the brake line or my flares from that steel line, so I bought a roll of Cupranil that I should have a lot more success with, and will re-do all the lines. The CRV Gen1 iBooster... I dunno. Current (small) consensus seems to be that the non-Tesla iBoosters have a different sensor or something inside them that causes the infamous shuddering, but I haven't been able to verify that, nor see if it's an actual problem under normal braking pressures.
I should probably rig up the cable-actuated handbrake just in case the iBooster proves to be useless or I get a throttle glitch.
Accelerator pedal needs to be pinned or epoxied and connected.
Inverter needs to be mounted, haven't even started that.
And I've never put a seat in, but presumably that's not too hard.
It doesn't have a windshield or doors on it right now, but, that might be good enough around the parkade. If I chicken out, I'll trailer it to a field or a walmart parking lot or something.
Could you post what components you ordered from Digikey if you still have that info?
You're doing the same through-hole board I was? Where'd you even get a board from, Damien hasn't sold those since his first run like, 4 years ago.
As to the Bill of Materials... here's a link to the last time someone asked for my shopping cart form Digikey: viewtopic.php?p=9367#p9367 ... it has some notes there.
Note that it's 4 years old, and when you click on the shopping cart link, first step is that it tells you that 3 parts are obsolete. Remember which ones (you'll have to source those ones yourself from Digikey's new stock), and the click the "remove those items" button and submit. Then it'll take you to the shopping cart.
I'd also love to know the part numbers for the 6 and 10 pin wire connectors and the 10 pin 90 degree connector for the ESP8266.
Notes are in the link above. You just need to know spacing and then you can pick whatever terminals you like. The 90-degree connector is for the Olimex board, which has been dogshit for a few years. Almost everyone else has switched to the Wemos D1 Mini board instead, though you'll have to manually wire it up. I think maybe Bratitude was going to spin off a dozen converter pins so you can shove the Wemos into the old Olimex slot, but, I just used wires.
This isn't the right thread to discuss this, use the end of the other thread I linked. That's about the throughhole board development.
Cool, sounds like you're getting close.
Do you even need a brake booster, those didn't have power brakes from the factory did they?
I downloaded the gerber files from Damien's git hub and had some pcb's made.
I now realize this is old and Johannes redid it and I should have ordered a board from Johannes.
But I have already learned a lot doing it this way, whether it works or not, I want to know as much as possible.
Thank you for the shopping cart link!
I went to the Dallas Makerspace last night and rummaged through their electronics department and got half of the board soldered together.
I've gotten the Olimex working and programmed off the pcb, maybe it will work for a while.
You don't need paint or a seat or windshield, go drive that thing!!!
tonycoke wrote: ↑Sun May 26, 2024 5:44 pmDo you even need a brake booster, those didn't have power brakes from the factory did they?
They sure did. Normally a brake booster is against the firewall, right behind the brake pedal. Well, because this whole vehicle was an argument between the engineers and the management, with the engineers insisting on a mid-engine car, every sacrifice had to be made to allow that. The little R2D2 bump on the passenger side of the hood? Had to be there to fit the air filer underneath. And the brake boost is ahead of the radiator, and actuated by a 2 foot long pushrod. Was just no room under the hood.
I went to the Dallas Makerspace last night and rummaged through their electronics department and got half of the board soldered together.
Neat! Makerspaces are amazing. My favorite places in the world. But very distracting. I went to mine for 3 years and never once worked on my own project. So I haven't been in 7 years now
You don't need paint or a seat or windshield, go drive that thing!!!
Well, it's in a private parking garage, so, I can't take it out on public streets without being licensed, and, narrow columns and corners is not an ideal testing ground.
.